
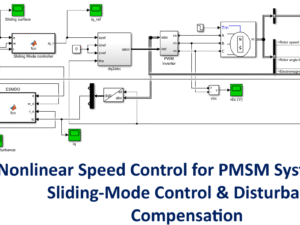
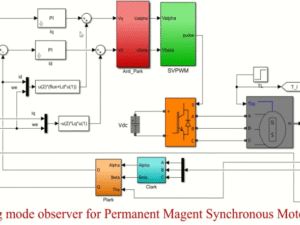
Nonlinear Speed Control for PMSM System Using Sliding-Mode Control & Disturbance Compensation
A nonlinear speed control strategy for a PMSM system uses a combination of sliding-mode control (SMC) and disturbance compensation to achieve high-performance speed regulation despite nonlinearities, parameter uncertainties, and external load disturbances. The SMC provides robustness by forcing the system’s state to a predefined sliding surface, while the disturbance compensation (often using a disturbance observer) actively estimates and cancels out unwanted effects. These techniques are often combined with novel reaching laws to improve performance and reduce chattering

Reviews
There are no reviews yet.